在工业生产中很多工厂都伴随着危险性,避免安全事故的出现,越来越多工业推出了机器人作业。而 工业机器人作为现代制造业的关键装备,集成了多种先进技术,这些技术的协同作用使得工业机器人能够高效、精准地完成各类复杂任务。那么,工业机器人需要哪些技术才能完成生产重担呢?下面,我们就一起来好好聊聊这个问题吧。

工业机器人需要哪些技术?
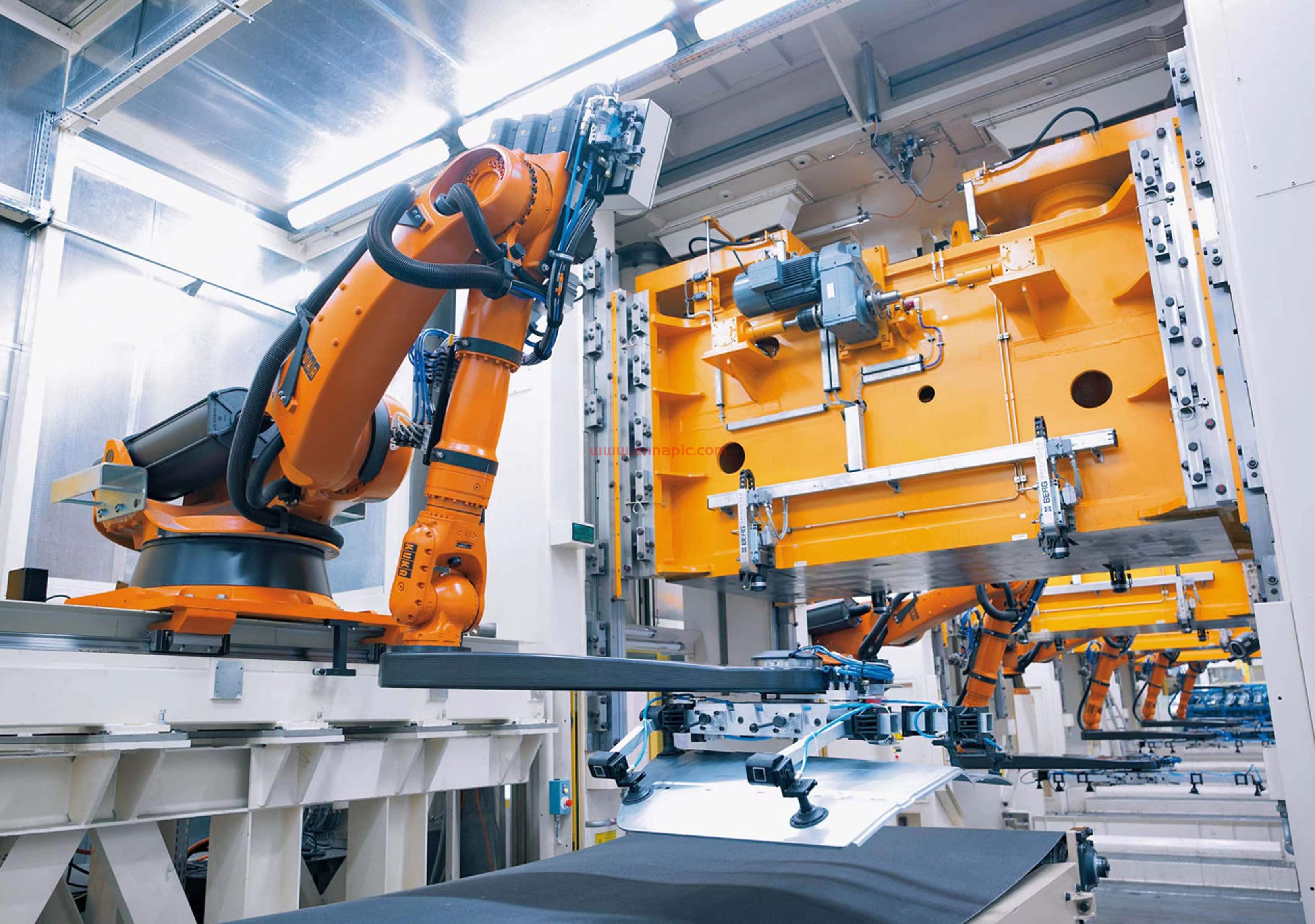
1、机械结构技术
工业机器人的机械结构是其执行任务的基础。它通常由关节、连杆、底座等部件组成,类似于人类的骨骼系统。为了实现高精度的运动,机械结构需具备高刚性和低重量的特点。比如,采用高强度铝合金材料制造连杆,既能保证结构强度,又能减轻整体重量,降低能耗。同时,机械结构的设计要满足不同的运动需求,常见的关节形式有旋转关节和移动关节,通过合理组合这些关节,工业机器人可以实现如笛卡尔坐标系下的直线运动、关节坐标系下的旋转运动等多种运动方式,以适应不同工业场景的操作要求。
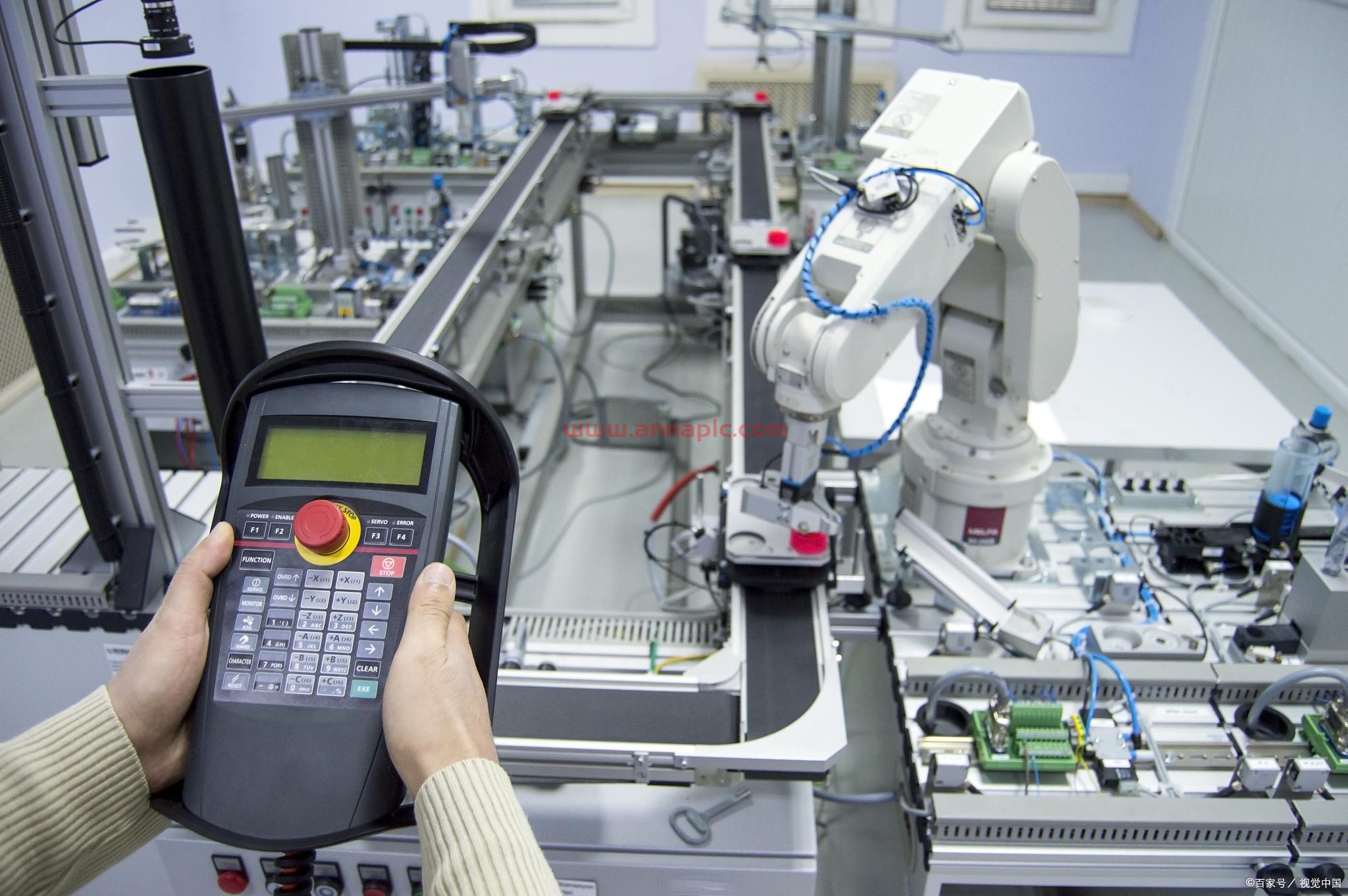
2、运动控制技术
运动控制技术是工业机器人的核心技术之一,它如同工业机器人的 “神经系统”,负责精确控制机器人各关节的运动。运动控制技术包括硬件和软件两部分。硬件方面,伺服驱动器和电机是关键组件。伺服驱动器根据控制器发送的指令,精确控制电机的转速、位置和扭矩,使机器人关节能够按照预定轨迹运动。软件方面,运动控制算法是核心,如插补算法,它能根据给定的路径点,计算出机器人各关节在每个时刻的运动参数,实现平滑的轨迹运动。此外,为了提高运动精度和稳定性,还会采用各种补偿算法,如摩擦力补偿、惯性补偿等,以消除机械系统的误差。
3、传感器技术
传感器赋予工业机器人感知外界环境的能力,相当于机器人的 “感官”。常见的传感器有位置传感器、力传感器、视觉传感器等。位置传感器用于实时监测机器人关节的位置,确保运动精度,常见的有编码器,通过测量电机轴的旋转角度来确定关节位置。力传感器则用于检测机器人与外界物体接触时的力和力矩,在装配、打磨等需要精确力控制的任务中发挥重要作用。例如,在精密零件装配时,力传感器可感知零件之间的装配力,避免用力过大导致零件损坏。视觉传感器是工业机器人的 “眼睛”,通过摄像头采集图像信息,利用图像处理和分析技术,识别目标物体的形状、位置和姿态,使机器人能够完成如物料分拣、焊接定位等任务。
4、人工智能技术
随着人工智能技术的发展,其在工业机器人中的应用越来越广泛。人工智能技术让工业机器人具备一定的 “智能”,能够自主学习和决策。机器学习算法可使机器人通过大量的数据学习,提高自身的操作技能。例如,在焊接任务中,机器人通过学习不同焊接工艺参数下的焊缝质量数据,自动优化焊接参数,提高焊接质量。深度学习技术则在视觉识别和语音交互方面发挥重要作用。通过深度学习算法训练的视觉模型,工业机器人能够更准确地识别复杂环境中的物体,实现更高级的操作。同时,语音识别和合成技术让机器人能够与操作人员进行自然语言交互,提高操作的便捷性。
5、通信技术
通信技术是实现工业机器人与其他设备协同工作的桥梁。工业机器人需要与上位机、其他机器人以及生产线上的各种设备进行数据通信。常见的通信方式有以太网、现场总线等。以太网具有传输速度快、通用性强的特点,常用于工业机器人与上位机之间的大数据量传输,如机器人将生产数据上传至管理系统。现场总线则适用于工业机器人与周边设备之间的实时通信,如 PROFIBUS、CANopen 等,它们具有高可靠性和实时性,能够确保机器人与传感器、执行器等设备之间的快速数据交互,实现生产线的高效协同运行。
综上所述,工业机器人是多种先进技术的集成体,机械结构、运动控制、传感器、人工智能和通信等技术相互融合、协同发展,推动着工业机器人不断向智能化、高效化、多功能化方向迈进,为现代制造业的发展提供强大动力。
 您阅读本篇文章共花了:
您阅读本篇文章共花了: